
[ Popis mise | Vědecké přístroje | Obrázky z Marsu | Akce Spiritu | Akce Opportunity | Home Page sond MER v JPL ]
|
| Start | M.označ. | Hmotnost | Popis |
|---|---|---|---|
| 10.06.2003 | 2003-027A | 1062 kg | - pohyblivé vozítko pro povrchový průzkum Marsu (MER-A, Spirit) |
| 08.07.2003 | 2003-032A | 1062 kg | - pohyblivé vozítko pro povrchový průzkum Marsu (MER-B, Opportunity) |
 Dva
rovery MER (Mars Exploration Rover) navázaly na úspěšnou misi sondy Pathfinder
s vozítkem Sojourner v roce 1997. Na rozdíl od Sojourneru, který za celou dobu
trvání jeho průzkumu okolí Pathfinderu najezdil okolo 100 metrů, byly nové rovery
schopny urazit tuto vzdálenost během jednoho solu - marťanského dne. Každý z nich
nesl vědecké přístroje pro hledání důkazů o přítomnosti tekoucí vody na povrchu
Marsu v minulých dobách. Oba rovery byly naprosto identické, ale přistály v různých
částech Marsu. Rover MER-A byl pojmenován Spirit a rover MER-B Opportunity.
Dva
rovery MER (Mars Exploration Rover) navázaly na úspěšnou misi sondy Pathfinder
s vozítkem Sojourner v roce 1997. Na rozdíl od Sojourneru, který za celou dobu
trvání jeho průzkumu okolí Pathfinderu najezdil okolo 100 metrů, byly nové rovery
schopny urazit tuto vzdálenost během jednoho solu - marťanského dne. Každý z nich
nesl vědecké přístroje pro hledání důkazů o přítomnosti tekoucí vody na povrchu
Marsu v minulých dobách. Oba rovery byly naprosto identické, ale přistály v různých
částech Marsu. Rover MER-A byl pojmenován Spirit a rover MER-B Opportunity.
Stručný popis mise
 Oby
rovery byly vypuštěny pomocí raket Delta
2 z kosmodromu na mysu Canaveral
na Floridě. Start prvního roveru (Spirit) se úspěšně uskutečnil v úterý 10.06.2003
v 17:58:47 UT. Start druhého roveru (Opportunity) byl několikrát odložen a nakonec
se uskutečnil v úterý 08.07.2003 v 03:18:15 UT. Rovery by měly na Marsu přistát
v lednu 2004. První rover (Spirit) byl nasměrován do kráteru Gusev a úspěšně
přistál v neděli 04.01.2004 v 04:35 UT). Cílovou oblastí druhého roveru byla
plošina Meridiani (k úspěšnému přistání Opportunity došlo 25.01.2004 v 05:05
UT).
Oby
rovery byly vypuštěny pomocí raket Delta
2 z kosmodromu na mysu Canaveral
na Floridě. Start prvního roveru (Spirit) se úspěšně uskutečnil v úterý 10.06.2003
v 17:58:47 UT. Start druhého roveru (Opportunity) byl několikrát odložen a nakonec
se uskutečnil v úterý 08.07.2003 v 03:18:15 UT. Rovery by měly na Marsu přistát
v lednu 2004. První rover (Spirit) byl nasměrován do kráteru Gusev a úspěšně
přistál v neděli 04.01.2004 v 04:35 UT). Cílovou oblastí druhého roveru byla
plošina Meridiani (k úspěšnému přistání Opportunity došlo 25.01.2004 v 05:05
UT).
Způsob přistání se příliš nelišil od přistání sondy Mars Pathfinder v roce 1997. Schránky s rovery vstoupily do atmosféry přímo z příletové dráhy od Země. První část brzdění obstaraly tepelné štíty. Po dostatečném poklesu rychlosti byl tepelný štít odhozen a o další zbrždění se postaral hlavní padák. Následně se nafoukly airbagy a několik desítek metrů nad povrchem Marsu došlo k inicializaci brzdícího motoru na tuhé pohonné hmoty a oddělení hlavního padáku. Od té chvíle schránky s rovery, chráněné nafouknutými airbagy, padaly na Mars volným pádem.
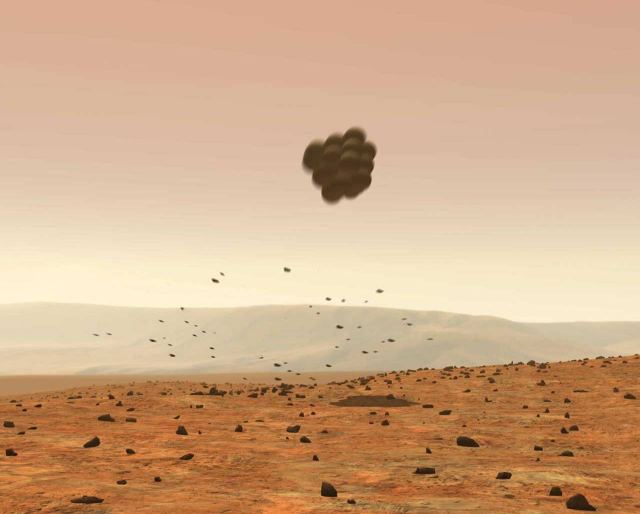 Na
povrchu provedly několik odrazů a než se definitivně zastavily, mohly po Marsu
urazit vzdálenost až jeden kilometr od prvního kontaktu s planetou. V klidovém
stavu došlo k vyfouknutí již nepotřebných airbagů a k otevření přepravních schránek,
chránící rovery po celou dobu jejich cesty ze Země. I v případě, kdy se schránka
s roverem zastavila na jedné z svých tří bočních stěn (stalo se tak u Opportunity),
nedošlo k žádnému problému. Při otevíraní se schránka vždy překlopila do správné
polohy tak, aby ji rover mohl opustit a zahájit svou misi.
Na
povrchu provedly několik odrazů a než se definitivně zastavily, mohly po Marsu
urazit vzdálenost až jeden kilometr od prvního kontaktu s planetou. V klidovém
stavu došlo k vyfouknutí již nepotřebných airbagů a k otevření přepravních schránek,
chránící rovery po celou dobu jejich cesty ze Země. I v případě, kdy se schránka
s roverem zastavila na jedné z svých tří bočních stěn (stalo se tak u Opportunity),
nedošlo k žádnému problému. Při otevíraní se schránka vždy překlopila do správné
polohy tak, aby ji rover mohl opustit a zahájit svou misi.
Přepravní schránky roverů MER byly konstruovány jiným způsobem než u Mars Pathfinderu. Ten měl na vědecké přístroje jak na přepravní schránce (vlastní sonda Pathfinder), tak i na roveru Sojourner. U mise Mars Exploration Rovers byly vědecké přístroje umístěny pouze na roverech. Schránky, chránicí rovery od startu ze Země až po přistání na povrchu Marsu, byly vybaveny pouze nezbytnými přístroji pro řízení přistání a pro otevření bočních stěn. Jejich otevření bylo zároveň i jejich poslední činností, a od té chvíle byly již pouhým nepotřebným odpadem.
 Ihned
po přistání vytvořily rovery 360ti stupňový panoramatický obraz okolí místa
přistání. Poté (po několika dnech) opustily přepravní schránky a sjely na povrch
Marsu.
Ihned
po přistání vytvořily rovery 360ti stupňový panoramatický obraz okolí místa
přistání. Poté (po několika dnech) opustily přepravní schránky a sjely na povrch
Marsu.
Přehled činnosti obou roverů je na speciálních stránkách Akce Spiritu a Akce Opportunity.
Za pomoci snímků, získávaných denně z roverů, vědci řídili pohyb roverů ke kamenům a jiným zajímavým místům na povrchu Marsu, aby určili jejich složení a strukturu v mikroskopickém měřítku. První cíle průzkumu byly v blízkosti přistávacích míst, s postupem času však rovery zkoumaly i mnohem vzdálenější objekty (až několik kilometrů daleko od místa přistání).
Kameny a horní vrstvu půdy Marsu zkoumalo pět vědeckých přístrojů na každém z roverů. Na obou roverech byl také speciální obrušovací nástroj RAT, který byl použit pro odstraňování části vnějších vrstev zkoumaných kamenů.
 Stejně
jako Sojourner, i rovery MERs na Marsu používaly radioizotopové ohřívací jednotky,
aby udržovaly dostatečnou teplotu baterií a elektronických přístrojů uvnitř
roverů během extrémně mrazivých marťanských nocí. Očekávané nejnižší noční teploty
dosahovaly až -105°C. Elektronika roverů byla konstruována na přežití a fungování
až do teploty -55 °C. Rovery byly vybaveny po osmi těchto ohřívacích jednotkách,
v každé z nich bylo zhruba 2,7 gramu oxidu plutoničitého.
Stejně
jako Sojourner, i rovery MERs na Marsu používaly radioizotopové ohřívací jednotky,
aby udržovaly dostatečnou teplotu baterií a elektronických přístrojů uvnitř
roverů během extrémně mrazivých marťanských nocí. Očekávané nejnižší noční teploty
dosahovaly až -105°C. Elektronika roverů byla konstruována na přežití a fungování
až do teploty -55 °C. Rovery byly vybaveny po osmi těchto ohřívacích jednotkách,
v každé z nich bylo zhruba 2,7 gramu oxidu plutoničitého.
Každý z roverů vážil okolo 180 kilogramů a za jeden sol (den na Marsu) byly rovery schopny urazit více než sto metrů. Na povrchu Marsu měly fungovat 90 solů (do dubna 2004), ale vzhledem k dobrému stavu roverů byla mise o mnoho let prodloužena.
Rover Spirit nakonec ujel celkem 7730 metrů a fungoval až do 22.03.2010 (přes 6 let). Během své jízdy mimo jiné vystoupal na vrchol několik desítek metrů vysokých kopců Columbia Hills a prozkoumal i zajímavou plošinu Home Plate (kde nakonec uvízl v písku [06.05.2009]).
Rover Opportunity zatím stále funguje a do srpna 2011 už ujel přes 33 km, prozkoumal krátery Endurance (o průměru 150 metrů), Victoria (o průměru 750 metrů) a dojel i k okraji kráteru Endeavour (o průměru 22 kilometrů). K cílovému útesu Cape York u kráteru Endeavour rover dorazil začátkem srpna 2011.
Vědecké přístroje![]() Každý
z roverů byl vybaven pěti hlavními vědeckými přístroji:
Každý
z roverů byl vybaven pěti hlavními vědeckými přístroji:
 Na
obou roverech byl rovněž obrušovací nástroj RAT (Rock Abrasion Tool) z Honeybee
Robotics, New York pro odstraňování povrchových vrstev zkoumaných hornin (které
byly znečištěny prachem a působením atmosféry) a tak zpřístupnění jejich vnitřku
pro provedení výzkumu.
Na
obou roverech byl rovněž obrušovací nástroj RAT (Rock Abrasion Tool) z Honeybee
Robotics, New York pro odstraňování povrchových vrstev zkoumaných hornin (které
byly znečištěny prachem a působením atmosféry) a tak zpřístupnění jejich vnitřku
pro provedení výzkumu.
Důležitou součástí roverů byly navigační kamery Navcam (Navigation camera), které sloužily pro pořizování stereoskopických snímků do vzdálenosti 30 metrů pro navigační účely a pro stanovení charakteristiky okolí. V přední i zadní části roveru bylo umístěno po jednom páru protikolizních kamer HazCam (Hazard Avoidance Camera). Obrázky z těchto kamer používal autonomní systém pro navigaci roveru v terénu.
Kamery PanCam, NavCam společně s periskopem pro spektrometr Mini-TES byly umístěny na otočném stěžni PMA (Pancam Mast Assembly) o výšce 83 cm.
Přístroje Mössbauer, APXS, MI a RAT byly neseny výklopným ramenem IDD (Instrument Deployment Device). Rameno o celkové délce 68 centimetrů mělo celkem 5 stupňů volnosti.
Dalším nákladem roverů byly sady magnetů pro zachytávání magnetických prachových částeček z atmosféry pro jejich pozdější studium některým z vědeckých přístrojů. Poskytnul je Niels Bohr Institute v Kodani, Dánsko.
Panoramic Camera - PanCam
 Pomocí
tohoto přístroje bude prozkoumáván okolní terén a budou hledány stopy po účincích
tekoucí vody. Snímky z PanCamu poslouží vědcům při výběru jednotlivých cílů
(kamenů a půdy) pro podrobnější výzkum, a také pro výběr dalších oblastí průzkumů,
kam budou rovery nasměrovány. Obrazové rozlišení kamer je třikrát lepší, než
u přistávacího modulu sondy Mars Pathfinder.
Pomocí
tohoto přístroje bude prozkoumáván okolní terén a budou hledány stopy po účincích
tekoucí vody. Snímky z PanCamu poslouží vědcům při výběru jednotlivých cílů
(kamenů a půdy) pro podrobnější výzkum, a také pro výběr dalších oblastí průzkumů,
kam budou rovery nasměrovány. Obrazové rozlišení kamer je třikrát lepší, než
u přistávacího modulu sondy Mars Pathfinder.
Miniature Thermal Emission Spectrometer - Mini-TES
Mini-TES je určen k zobrazování okolí roverů v infračervené oblasti a k určování
typů a množství různých druhů minerálů. Zvláštním úkolem je pátrání po nerostech
utvářených působením vody. Pomocí tohoto spektrometru mohou být vytvářeny panoramatické
obrázky a spolu s informacemi z PanCamu budou sloužit pro vyhledávání nových
cílů výzkumu.
Mössbauer Spectrometer
Na robotickém rameni umístěný spektrometr bude provádět měření z bezprostřední
blízkosti zkoumaného kamene nebo části půdy - zaměří se na hledání minerálů,
obsahujících železo. Tato měření pomohou vědcům ke stanovení role, kterou hrála
voda při tvorbě těchto minerálů a k rozlišení rozsahu jeho zvětrání. Přístroj
obsahuje dva miniaturní kobaltové (Co57) zdroje pro ozařování zkoumaných vzorků
a detektory pro zachytávání vracejícího se gama a rentgenového záření. Obdobné,
ale větší spektrometry jsou používány při pozemských průzkumech hornin a půdy.
Alpha Particle X-Ray Spectrometer - APXS
![]() Vylepšená
verze přístroje, umístěného na roveru Sojourner, je rovněž používána v pozemských
geologických laboratořích. Pomocí malého množství curia 244 je možné s tímto
přístrojem měřit koncentrace hlavních složek hornin a půdy a určovat změny,
ke kterým docházelo v průběhu času.
Vylepšená
verze přístroje, umístěného na roveru Sojourner, je rovněž používána v pozemských
geologických laboratořích. Pomocí malého množství curia 244 je možné s tímto
přístrojem měřit koncentrace hlavních složek hornin a půdy a určovat změny,
ke kterým docházelo v průběhu času.
Microscopic Imager - MI
 Detailní
snímky hornin a půdy mohou poskytnout důležité informace vedoucí k určení způsobu
jejich utváření. Například velikost a drsnost jejich zrn ve vodou nanesených
sedimentech může prozradit způsob jejich dopravy a usazování. Tento zobrazovač
poskytne detailní data pro toto studium.
Detailní
snímky hornin a půdy mohou poskytnout důležité informace vedoucí k určení způsobu
jejich utváření. Například velikost a drsnost jejich zrn ve vodou nanesených
sedimentech může prozradit způsob jejich dopravy a usazování. Tento zobrazovač
poskytne detailní data pro toto studium.
Největší vědeckou otázkou, která by měla být objasněna za pomocí dat poskytnutých přístroji na roverech MER, je jak ovlivňovala tekoucí voda prostředí na Marsu v minulých dobách. Protože se v současné době tekutá voda na Marsu nevyskytuje, je nutné hledat známky jejího dřívějšího působení v horninách, minerálech a geologických charakterech terénu, zvláště v těch, které mohly být utvářeny pouze za přítomnosti tekoucí vody.
Hlavními vědeckými úkoly roverů bylo: Hledání
a charakterizace různých hornin a půd, které obsahují známky po dřívější aktivitě
vody. Zvláště se zaměřením na vzorky s obsahem minerálů, souvisejících s vodními
procesy, jako například srážením, vypařováním, zpevňování naplavováním, nebo
hydrotermálním působením.
Hledání
a charakterizace různých hornin a půd, které obsahují známky po dřívější aktivitě
vody. Zvláště se zaměřením na vzorky s obsahem minerálů, souvisejících s vodními
procesy, jako například srážením, vypařováním, zpevňování naplavováním, nebo
hydrotermálním působením.[ Obsah | Nepilotované kosmické lety | Program Mars (USA) | Program Mars (Rusko) ]